
Productum



Motor sine nucleo, torques magni 35kg, cum rotis metallicis digitalibus et chalybeis inoxidabilibus, cum rotis Arduino ad currus roboticos RC.
Motor sine nucleo torquens 35kg cum rotis metallicis digitalibus et chalybeis inoxidabilibus.Servomotor Arduino pro autocineto robotico RC facto,
Motor sine nucleo torquens 35kg cum rotis metallicis digitalibus et chalybeis inoxidabilibus.,




Applicatio
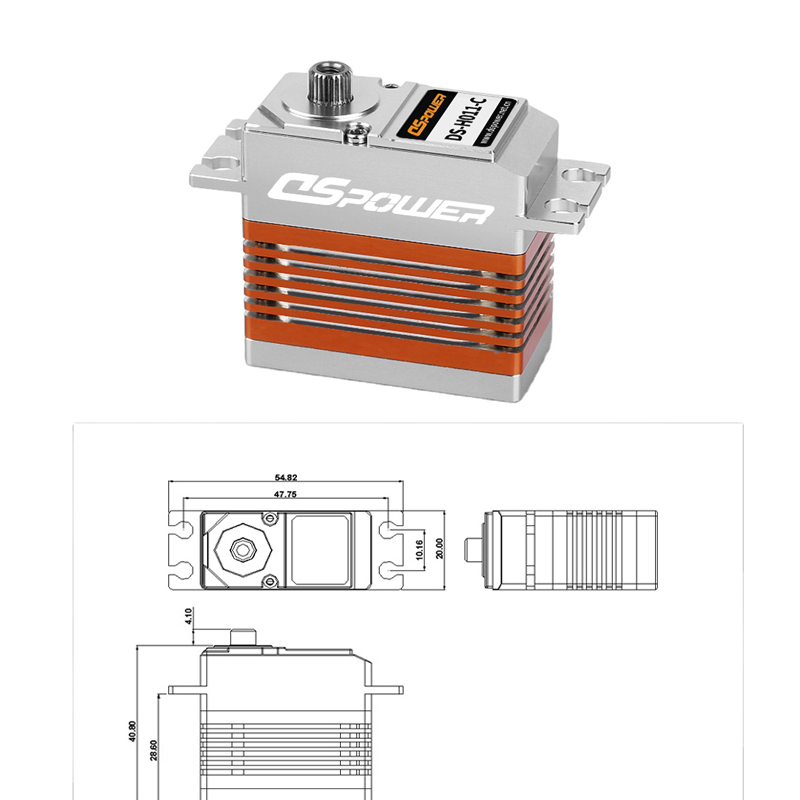
| Momentum Torquens Stallationis | ≥27.0 kgf.cm ad 6.0 V |
| ≥30.kgf.cm ad 7.4V | |
| Celeritas sine Onore | ≤0.09 sec./60° ad 6.0V |
| ≤0.07 sec./60° ad 7.4V | |
| Angulus Itineris Operandi | 180°±10° (500~2500μs) |
| Angulus Limitis Mechanicae | 210° |
| Pondus | 70±1 g |
| Magnitudo | 40 × 20 × 39.9 mm |
| Materia involucri | Involucrum ex mixtura aluminii |
| Materia Instrumentorum | Instrumenta dentata mixturae titanii |
| Typus Motoris | Motor sine spazzolis |
Proprietates
Scenaria Applicationum
Ad helicoptera, aeroplana, robota, scaphas, brachium roboticum et domum intelligentem gubernandam a distancia. Omnia genera ludicrorum radiophonicorum et experimentorum Arduino sustinet.

Quaestiones Frequentes
Q: Quas certificationes habet servo tuus?
A: Servo nostro certificationes FCC, CE, ROHS habent.
Q: Quae est latitudo impulsuum servo?
A: Si nulla specialis requisitio est, 900~2100usec est; si latitudinem pulsus specialem requiris, nobiscum contactum fac.
Q: Quaenam est communicatio servo tuo?
A: PWM, TTL, RS485 facultativa sunt. Pleraque servomotoria PWM in default habent, si PWM non requiris, nobiscum contactum fac.
Q: Quamdiu servo meo ferre possum?
A: – Si minus quam 5000 unitates ordines, 3-15 dies operis capient.
- Si plus quam 5000 unitates ordines, 15-20 dies operis capient.
Servomotor DSpower DS-R003B 35KG est motor servomotor potens destinatus ad magnum momentum rotatorium praebendum in applicationibus quae gravem motus moderationem requirunt. "35KG" ad maximum momentum rotatorium refertur quod servomotor generare potest, quod est circiter 35 kg-cm (circiter 487 oz-in).
Hae servomotores vulgo in robotica magnae scalae, automatione industriali, aliisque applicationibus quae onera gravia moderanda includunt vel vim mechanicam validam requirunt, adhibentur. Magnus momentum rotans servomotoris 35 kg ei permittit ut officia perficiat quae vim et moderationem magnam requirunt, ut brachia robotica magna movere vel machinas graves operari.
Motor servomotor constat ex motore DC, capsa rotarum, et circuitu moderatorio. Circuitus moderatorius signa accipit a moderatore vel microcontrolatore qui positionem vel angulum desideratum pro axe emisso servi specificat. Deinde circuitus moderatorius tensionem et currentem motori suppeditatam adaptat, permittens servomotori ad positionem desideratam moveri.
Robusta constructio servomotoris 35 kg plerumque includit involucrum metallicum vel plasticum altae firmitatis ad momentum torquendi maius sustinendum et firmitatem praebendam. Etiam incorporare potest notas sicut sensoria retroactionis ad accuratiam et imperium auctum.
Notandum est servos 35KG maiores et graviores esse quam minores, itaque typice in applicationibus adhibentur quae magnitudini et potentiae requisitis eorum accommodare possunt.
Summa summarum, servomotor 35KG est motor servomotor robustus, qui magnum momentum rotatorium praebere potest, ita ut aptus sit ad usus qui potentiam magnam et accuratam gubernationem requirunt.
-

Unus ex calidissimis pro Agfrc C037cls 0.55kg. Cm Tor...
-

20KG Altae Momenti Impervius Instrumentorum Metallicorum Plenorum...
-
MG90S Omnibus metallicis apparatibus 9g Servo SG90 versio emendata...
-

Exemplum gratuitum pro DSpower 0.65kg Torque Super Lig...
-
DSpower 20KG Servomotor Digitalis Altae Momenti Plenus Met...
-

Motor sine nucleo torquens 35kg cum rotatione metallica...